
前の記事では、PIパラメータを適当に設計しました。しかしながら、実際は仕様を満たすように制御パラメータを設定する必要があります。ここでは、制御パラメータを設定するために必要な降圧コンバータの周波数応答の推定方法を紹介します。

制御設計の考え方
降圧コンバータのブロック線図は図1のとおりです。プラントはPI制御器出力のDutyを入力とし、Dutyに応じた電圧値を出力します。このとき、入力されるDutyと出力される電圧の間の関係はプラントにより異なります。したがって、PI制御器においては、このプラントの特性というものを考慮して設計する必要があります。

例えば、図2のように物体の運動を考えます。
力Fを加えたとき、どのような移動をするかというのは運動方程式で記述できます。
$$ m \ddot{x} = F $$
この式から、質量に応じて加えるべき力の大きさが変化することが分かります。このように、プラントの動作を簡単な微分方程式で記述できれば制御設計は比較的容易に行えます。しかしながらパワーエレクトロニクス機器ではスイッチオン/オフ動作が存在し、プラントの特性が不連続的に動作します。このような場合、簡単な微分方程式では記述できないため、プラントの数式モデルを得るには工夫する必要があります。
パワーエレクトロニクス機器のプラント特性の取得
先ほどの項で、パワーエレクトロニクス機器で数式モデルを取得することが困難であることを指摘しました。そこで利用できる方法として、実験的にデータを取得する方法です。イメージを図3に示します。
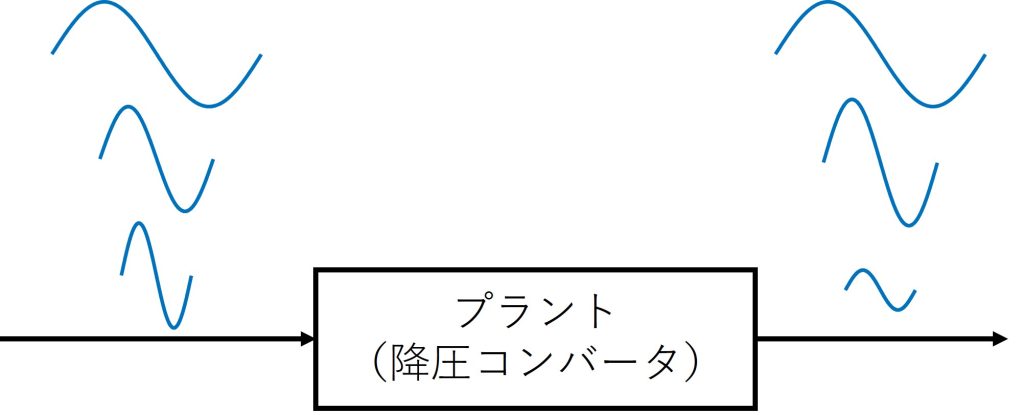
様々な周波数をプラントに印加して、その応答を取得する
知りたいプラントの特性は、周波数に対するゲインと位相になります。つまりボード線図を取得することが目的となります。数式モデルで取得できないのであれば、様々な周波数信号を入力し、その応答を取得することで周波数特性を得ることができます。
Simulinkによるモデルの周波数特性取得
ここでは、Simulinkを使用して周波数特性を取得してみます。使用するモデルは図4です。降圧コンバータの制御で使用したモデルのパラメータを微調整しています。今回はプラントに対してDutyを入力し、その時の出力電圧を取得しようとしています。したがって、Duty信号に周波数信号を重畳させ、その時のVoutを取得します。
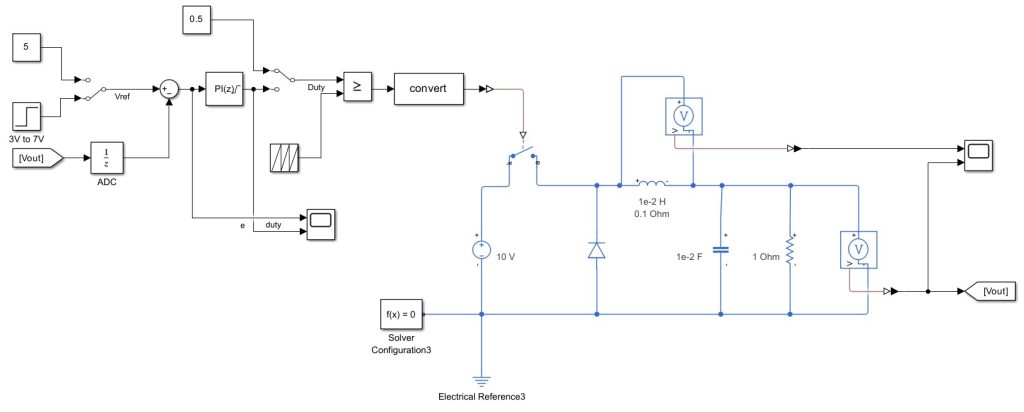
このモデルのPI制御器のパラメータを決定するために、降圧コンバータの周波数特性を取得する
マニュアルで設定することも不可能ではないですが、大変です。そこで、Simulinkで保有している機能を利用します。アプリの中のモデル線形化器を利用します。アイコンは図5のとおりです。

クリックすると、図6のとおりモデル線形化アプリが立ち上がります。この中で、周波数応答を推定するには、左上の三か所を設定する必要があります。以下、設定方法を説明します。
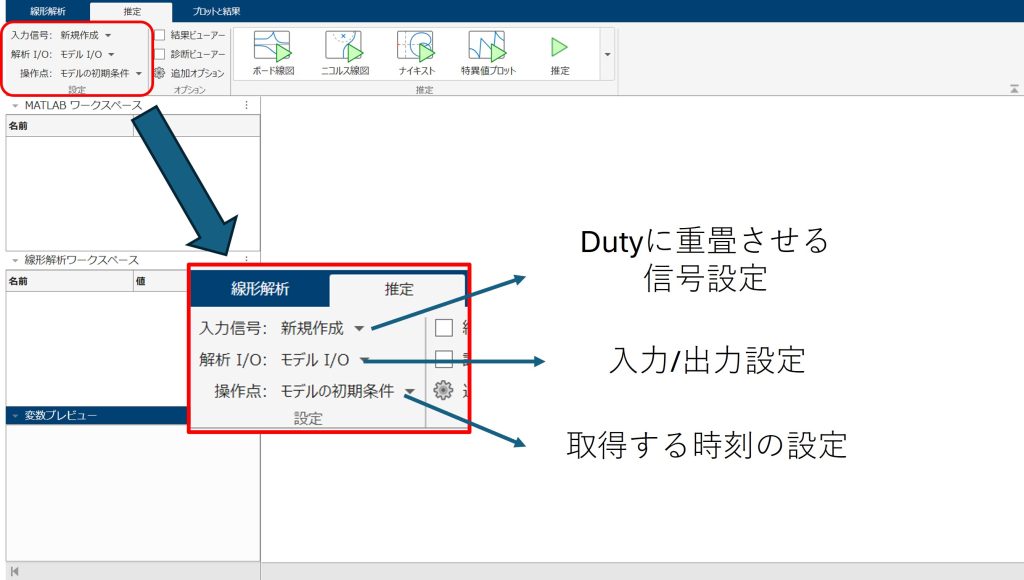
入力信号・解析I/O・操作点の3か所を設定する
入力信号の設定
入力信号はどのような信号をプラント入力に与えるかを指定します。様々な信号を入力できますが、図7のとおり固定サンプル時間Sinestreamを選択します。Duty信号はマイコンで生成される信号のため固定サンプル時間の信号を選んでいます。

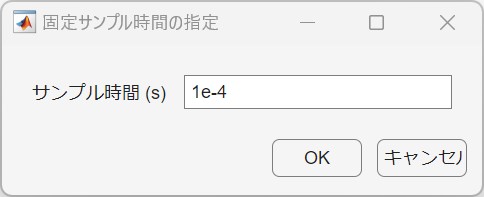
クリックするとサンプル時間の設定画面が現れます。ここにはマイコンのサンプリング時間を記入します。今回は図8のとおり100usで動作するマイコンとします。
次に、どのようなSinestream信号を入力するかの設定画面が現れます。今回は、10~1000Hzの周波数特性を取得するように設定します。図9のとおりに設定します。設定について、以下の二点に注意します。
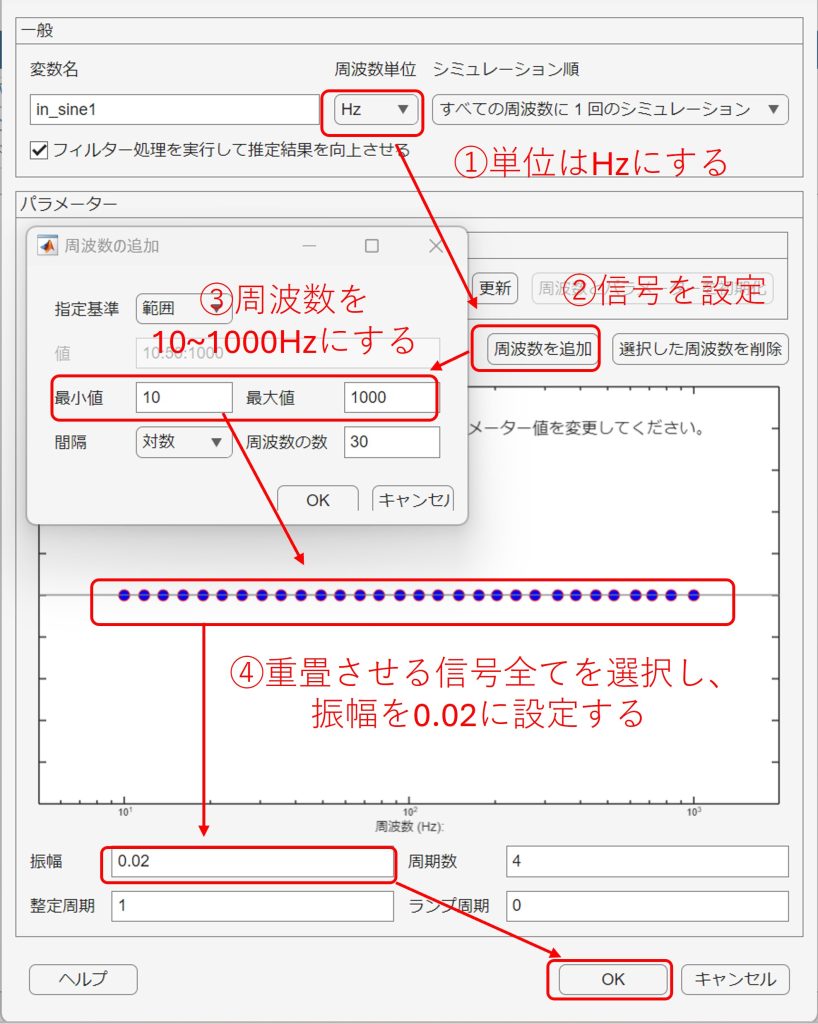
周波数や振幅などを設定する
- 周波数範囲について、サンプル時間の影響を受けます。例えば、今回のようなサンプリング周期100usの場合、10000Hzのような信号を適切に取得することができません。
- 振幅について、重畳先の信号を基に設定します。今回のDutyは0.5などの大きさのため、その4%の0.02と設定します。あまりに小さくても大きくてもうまく動作しない可能性があります。
解析I/Oの設定
解析I/Oは、どこに信号を入れるか、どこから信号を取り出すかを設定します。図6のモデルI/Oというのはシミュレーションモデル上で設定した解析点を使用するという意味です。ここでは、モデルI/O設定で解析します。
モデルに対して、解析点を追加するには、Simulinkのアプリタブの線形化マネージャーを利用します。アイコンは図10のとおりです。
線形化マネージャーを開くと上側に、ツールが表示されます。図11のとおり、Duty信号に対して入力の摂動を、UnitDelay出力に対して出力の測定を設定します。設定すると図中のとおり、入力の摂動・出力の測定を示すアイコンがモデル上に表示されます。これで、解析I/Oの設定は完了です。
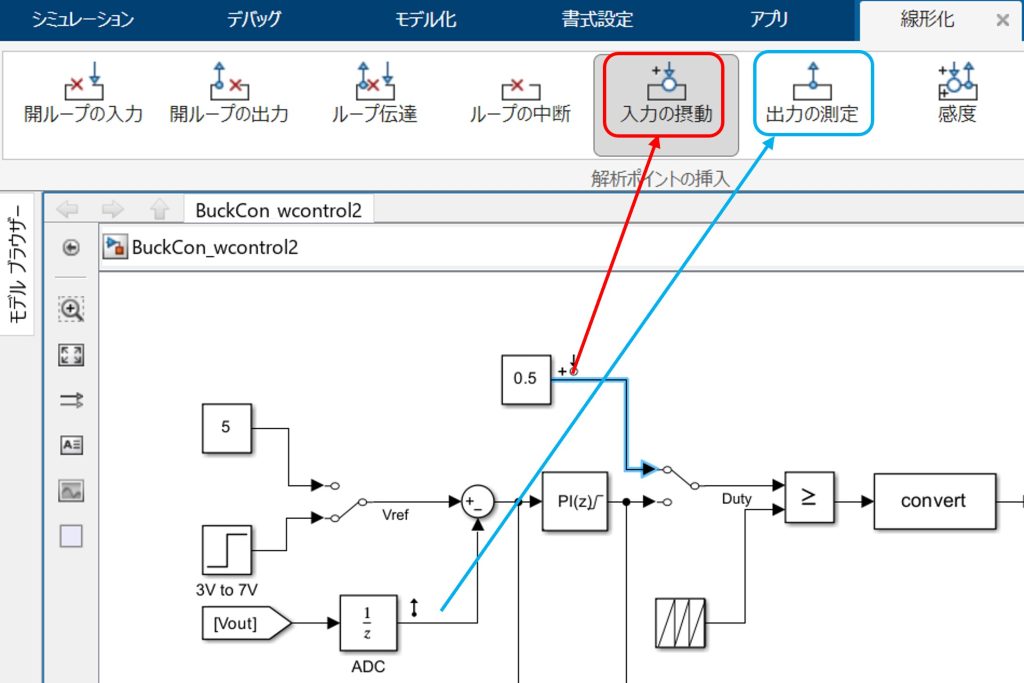
入力には入力の摂動を、出力には出力の測定を設定する
操作点の設定
操作点はどのタイミングのモデルの周波数特性を取得しますかということを聞いています。今回はプラントが定常状態に至っているときの周波数特性を取得したいので、シミュレーション終了時刻、0.1sを設定したいと思います。
設定は図12のとおり、操作点→シミュレーションのスナップショットを取る→シミュレーションのスナップショット時間を0.1に設定→スナップショットを撮るという手順で設定します。
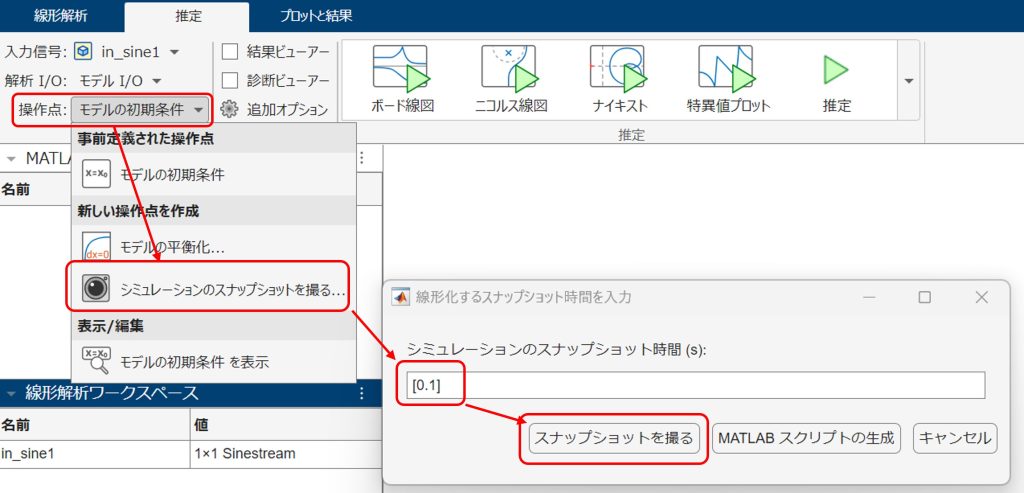
「スナップショットを撮る」をクリックすると、シミュレーションが動作し、操作点(t = 0.02s)の状態を取得してくれます。動作が完了すると図13のとおり自動で操作点に反映してくれます。これで操作点の設定は完了です。
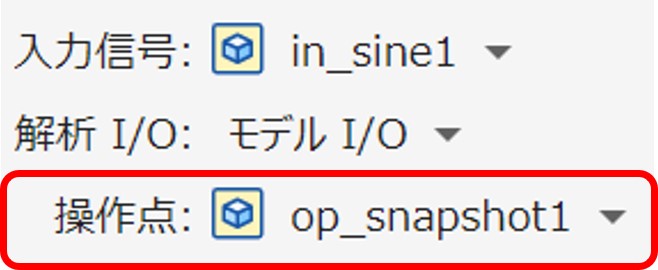
操作点の取得が完了すると、このような設定になる
ボード線図の取得とエクスポート
入力信号・解析I/O・操作点の3点を設定出来たら、ボード線図を取得できます。図14のとおり、ボード線図をクリックします。クリックすると、周波数応答を取得するために、シミュレーションを動作させます。そのため、結果が表示されるまでに時間がかかります。

入力信号・解析I/O・操作点を設定できたら、ボード線図をクリックする
しばらく待つと、図15のとおりボード線図が表示されます。注意点ですが、サンプリング周期に対して高周波側では、うまく動作しません。そのため、図15でも高周波側の特性が微妙になっています。

高周波側では、サンプリング速度の都合上、精度を出すことができない
この結果をもとに、制御設計を行います。現在のボード線図はモデル線形化器のアプリ上にのみ存在しています。これを利用できるようにMATLABワークスペースへエクスポートします。エクスポートのやり方は図16のとおりです。右クリックし、MATLABワークスペースへのエクスポートをクリックします。
以上が降圧コンバータの周波数応答の推定であり、制御設計のための準備となります。
まとめ
このページでは、制御パラメータを設定するために降圧コンバータの周波数応答の推定方法を紹介しました。ポイントは以下のとおりです。
- 制御パラメータを設定するためには、プラント(降圧コンバータ)の特性を把握する必要があります
- パワーエレクトロニクス機器の場合、不連続性のためプラントの特性を数式で表すのが困難であり、周波数応答の推定を利用します
- 周波数応答の推定方法として、Simulinkのモデル線形化機能を利用しました。
