
双方向コンバータでは、ダイオードの代わりに半導体スイッチを採用しました。その半導体スイッチのゲート信号は、もう一つの半導体スイッチの論理反転となります。このような整流方式をとる場合のゲート信号には注意点がありますので、その注意事項について紹介します。

実際の半導体におけるスイッチング動作の遅れ
一般論として、理想的な半導体スイッチの動作と実際の半導体スイッチの動作は異なります。図1にその違いを紹介します。
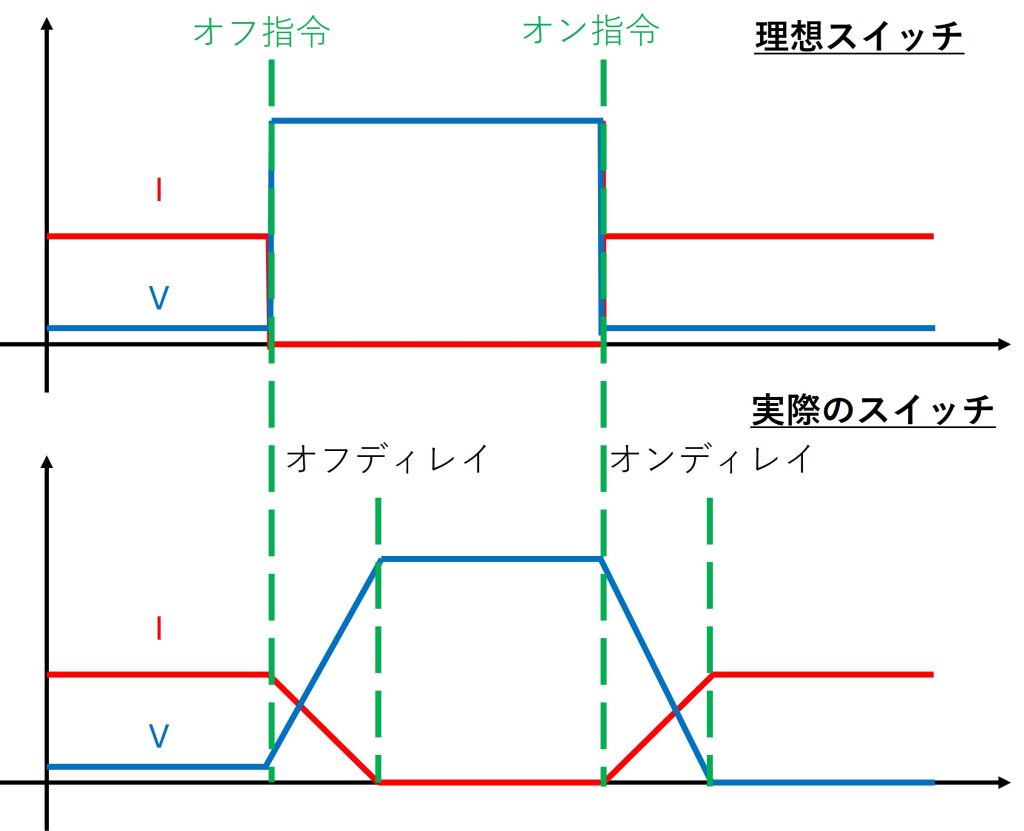
実際のスイッチには動作遅れが存在する
理想的なスイッチにおいては、ゲートのオフ・オンの指令が来たときに即時に動作するため、上側のような波形になります。一方、実際のスイッチにおいては、ゲートのオフ・オン指令に対して動作遅れが発生します。そのため、下側のような波形になります。
同期整流においてはこの遅れが問題になるというのが、このページでのメイントピックです。
同期整流におけるデッドタイムの必要性
双方向コンバータの半導体スイッチ部を図2に示します。このように半導体スイッチを相補的に動作させることを同期整流などと呼んだりします。

ハイサイドとローサイドを
論理反転でスイッチングする
この同期整流方式では、ハイサイドスイッチがONからOFFになるタイミングでローサイドスイッチがOFFからONになります。理想的なスイッチではこれで問題なく動作しますが、実際の半導体スイッチでは動作しない可能性が高いです。
どこで問題になるかというとスイッチングの瞬間です。前節にて記述したとおり、実際の半導体では動作遅れが生じます。そのため、図3のとおり半導体のスイッチングにおいて、短絡が発生する可能性があります。
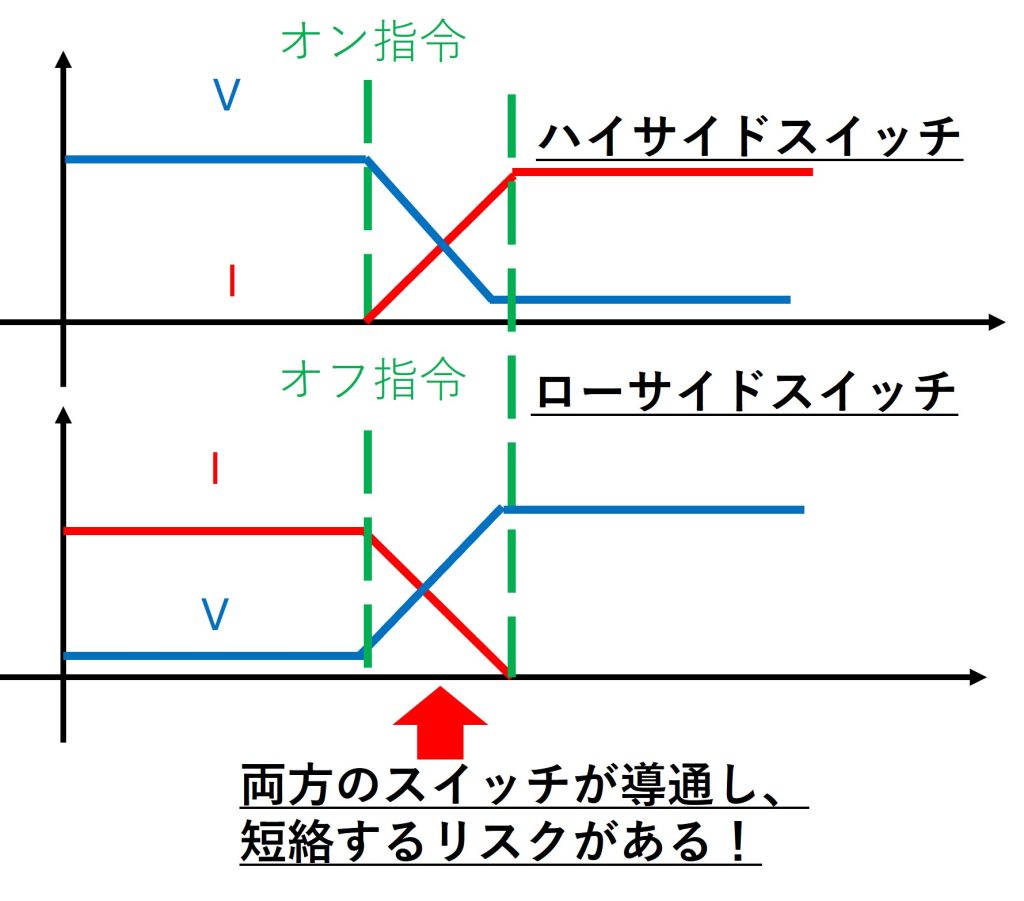
スイッチング動作遅れにより、両サイドのスイッチ
が短絡する可能性がある
デッドタイムの導入
前述の短絡を防止するために、デッドタイムというものを設けることが一般的です。デッドタイムとはハイサイドスイッチ、ローサイドスイッチの双方がOFFになるタイミングのことです。
デッドタイムを設けた場合のスイッチング時の動作を図4に示します。オンする側の指令を遅らせることで短絡を防止することができます。一般にこのデッドタイムは半導体スイッチの特性に依存します。
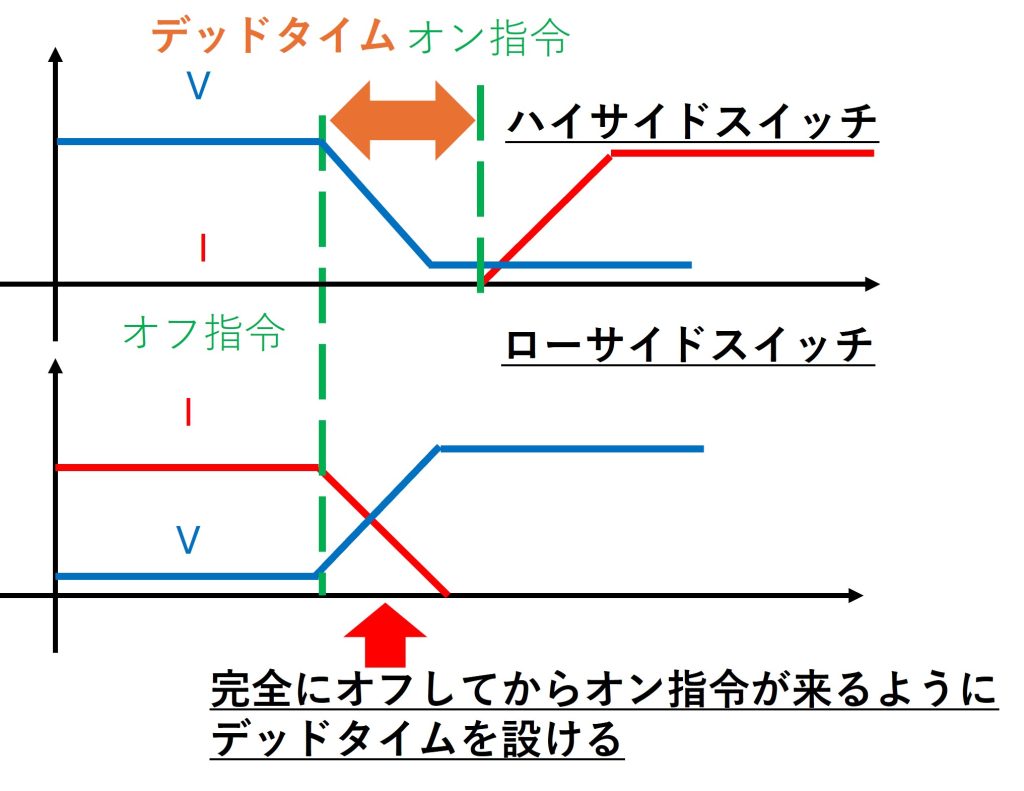
デッドタイムにより、短絡を防止することができる
デッドタイム補償の方法
デッドタイムを設けることで短絡を防止することができますが、スイッチング動作が遅れるため、出力電圧が低下します。この低下分を補償するように制御をかける必要があります。ここでは、どれだけ電圧が低下するか計算します。
デッドタイムがない場合とある場合の波形を図5に示します。
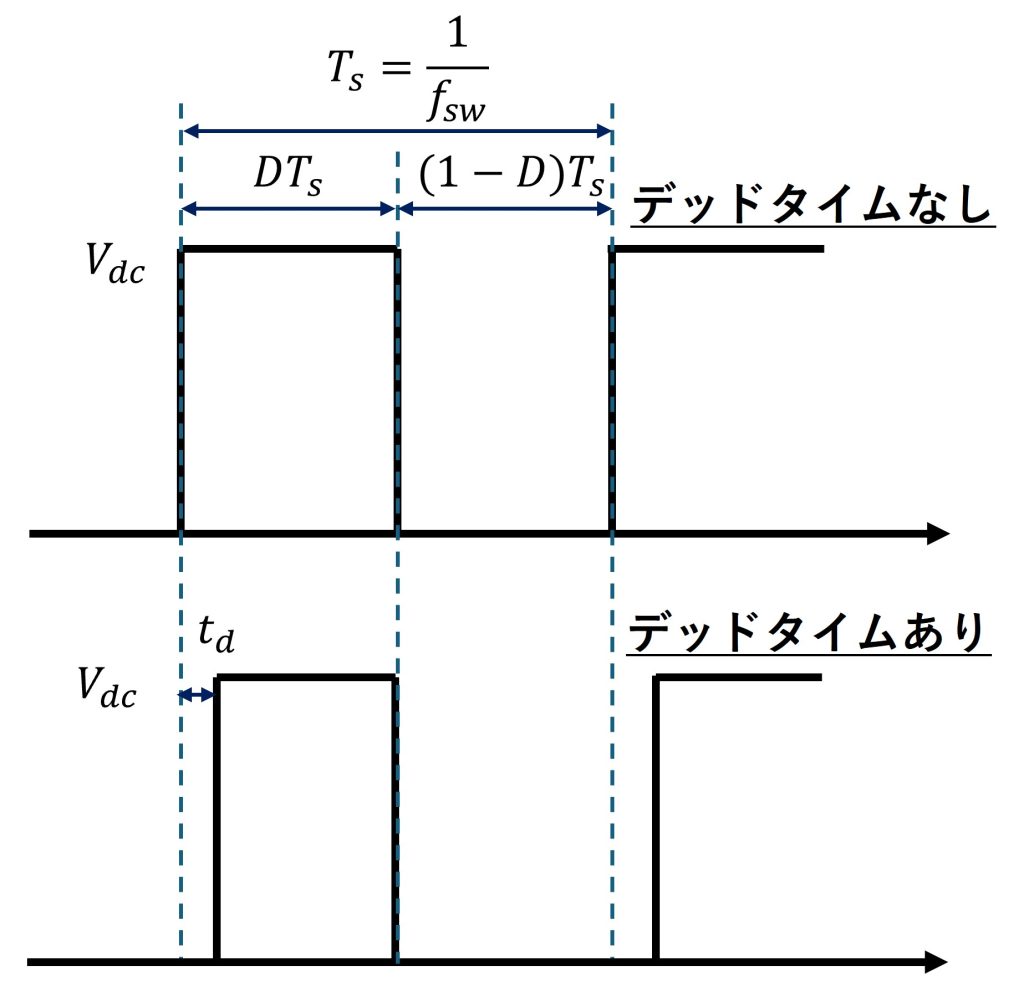
デッドタイムによりオン時間が短くなり、
平均電圧が低下する
デッドタイムがない場合の出力平均電圧を考えます。出力平均電圧は1周期における電圧平均を考えればいいので、次の式となります。
$$V_{avg} = \frac{DT_s}{T_s}V_{dc} = DV_{dc}$$
同様に、デッドタイムがある場合の出力平均電圧を考えます。
$$V_{avg} = \frac{DT_s – t_d}{T_s}V_{dc} = DV_{dc} – \frac{t_d}{T_s}V_{dc} = DV_{dc} – t_df_{sw}V_{dc} $$
この式の第1項はデッドタイムがない場合の電圧を示します。したがって、デッドタイムを設けることにより第2項だけ電圧が低下することになります。そのため、この電圧低下分を考慮して制御をかける必要があります。
まとめ
このページでは、同期整流方式における問題とその対策について紹介しました。ポイントは以下のとおりです。
- 同期整流方式において、回路が短絡するリスクがあります。
- 短絡を防止するために、二つの半導体スイッチがOFFするデッドタイムを設けることが一般的です。
- デッドタイムを設けることで、出力電圧に誤差が生じます。この誤差を補償することをデッドタイム補償と呼びます。
